Come vi ho raccontato la settimana scorsa, il secondo obiettivo di queste vacanze natalizie, ormai giunte ben oltre il loro termine, era il montaggio della mia nuova centrale di controllo DCC. Il tentativo è quello di eliminare completamente il vecchio, ingombrante e rumoroso PC che utilizzavo per farvi girare RocRail per sostituirlo con qualcosa di decisamente più compatto. Vista la diffusione ormai raggiunta e considerato il fatto che due dei più importanti software di controllo gratuiti -RocRail e JMRI- entrambi la supportano, ho optato per una economicissima Raspberry Pi 3b (link).
Già da sola questa schedina fa ottime cose: una CPU ARMv8 quad-core 64-bit da 1.2GHz asservita da 1GB di RAM (accoppiata decisamente più performante di quella del vecchio PC), rete cablata e wireless, bluetooth, e tutta una serie di porte decisamente utili, tra cui 4 USB per tastiera e mouse -e magari un monitor touch in futuro per realizzare il pannello di controllo. Il tutto in poco più di 8x5 cm: meno di un cellulare...
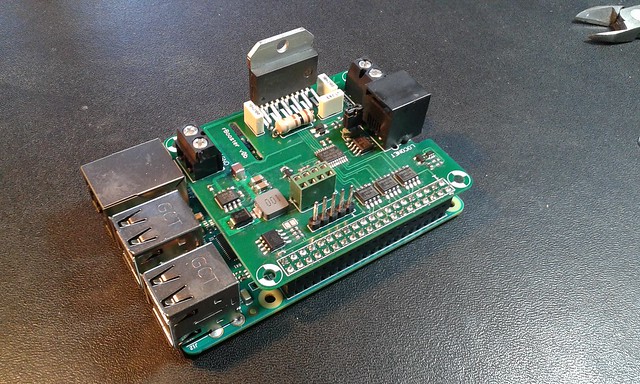
Ovviamente non può fare tutto da sola: per questo ho realizzato una scheda figlia -un hat in gergo- battezzata per l'occasione rBooster per generare il segnale DCC, per il tracciato ed il bus loconet, e contemporaneamente derivare l'alimentazione stabilizzata della Raspberry senza dover ricorrere ad un secondo alimentatore. Il grosso chip che vedere sul fondo è lo stesso chip che ho utilizzato per la vecchia interfaccia DCC: può gestire fino a 55W, decisamente sufficienti per un impianto piccolo come Caprazzino.
La soluzione non brilla certo per originalità, dal momento che esiste già una alternativa commerciale (link), ma non vedo perché non dovrei tentare di costruire da solo la mia versione del sistema di controllo secondo i miei desideri. D'altra parte esistono anche persone che si costruiscono da se i rotabili...
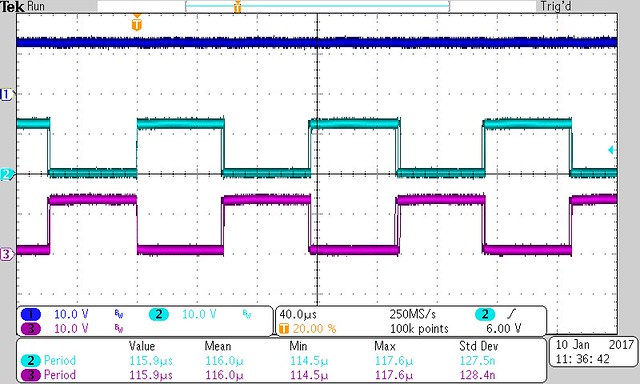
Nelle prossime settimane, oltre a lavorare sui restanti deviatoi del piano di stazione di Caprazzino, proseguirò con la programmazione dei due strati -rBoster e Raspberry-. Nel frattempo vi mostro il primo vagito del booster che al momento altro non fa se non inviare sulle rotaie il segnale di idle del DCC. Le tempistiche sono decisamente soddisfacenti ed in linea con le specifiche NMRA -le norme modellistiche americane che dettagliano il funzionamento del DCC.
Al momento non mi sono posto scadenze per il completamento di rBooster, ma spero di vederlo in funzione entro l'estate, in tempo per i primi giri di ruota in stazione a Caprazzino.
A presto!
Nessun commento:
Posta un commento