Come promesso la scorsa settimana, negli ultimi giorni, ho fatto qualche prova con AndRoc (link). Devo dire che sono abbastanza soddisfatto: a parte la curva di apprendimento un poco ripida per chi come me è amante dello "sbagliando si impara" piuttosto che del leggere pedissequamente tutto il manuale, il programma è veramente ben fatto. Innanzitutto mi ha permesso di controllare tutto il plastico in maniera chiara da un solo dispositivo. In secondo luogo i tempi di risposta dei comandi inviati sono veramente ottimi. Vero è che per ora sto testando il tutto con una sola loco: vedremo ben più avanti come andranno le cose con più loco ed una tabella oraria degna di questo nome.
Ma veniamo al funzionamento. In questo momento vi sto scrivendo dal tavolo della sala: il plastico ed il sistema di controllo sono alimentati di là in studio ed io vi posso accedere tramite VNC, come vedete da questa foto.

Sulla sinistra, tra le varie icone, trovano posto quella per far partire il server di RocRail (la terza dal fondo) e la sua interfaccia di controllo RocView (la seconda dal fondo). Facciamo partire il server con un bel doppio click e, avendo cura di aver disabilitato i messaggi di debug, otteniamo questo risultato.
A questo punto, visto che sono ancora in fase di sviluppo, prima di far partire AndRoc, preferisco lanciare RocView: in questo modo posso controllare dallo schermo del PC che tutto fili liscio.
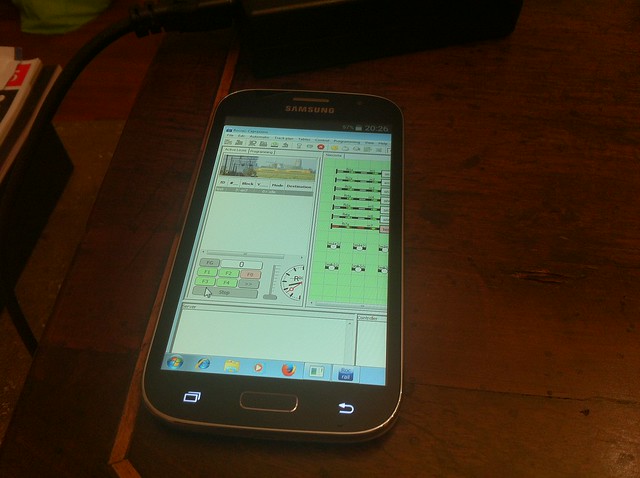
Bene! Pare sia tutto in ordine: il software si ricorda che avevo lasciato il mio convoglio di test -la E190 CFI, un bagagliaio posta UIC-X in livrea MDVE e una semipilota MDVE- sul binario 7, anche se per ora non li "sente" dato che, seppure alimentati, il sistema di controllo è spento, come testimonia il pulsante non premuto a forma di lampadina in alto, sotto la barra dei menù. E' ora quindi di lanciare AndRoc.

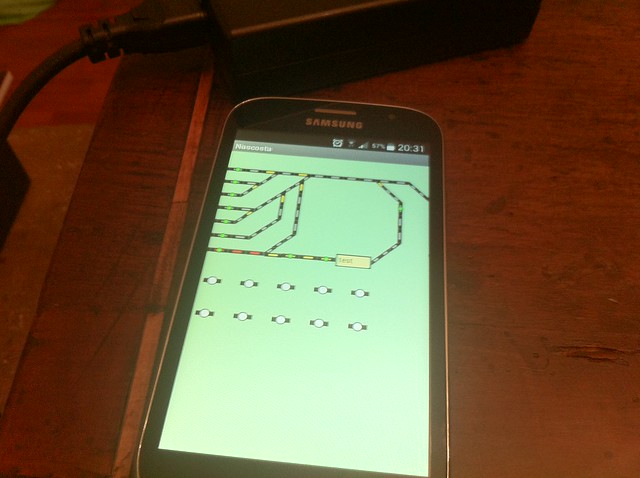
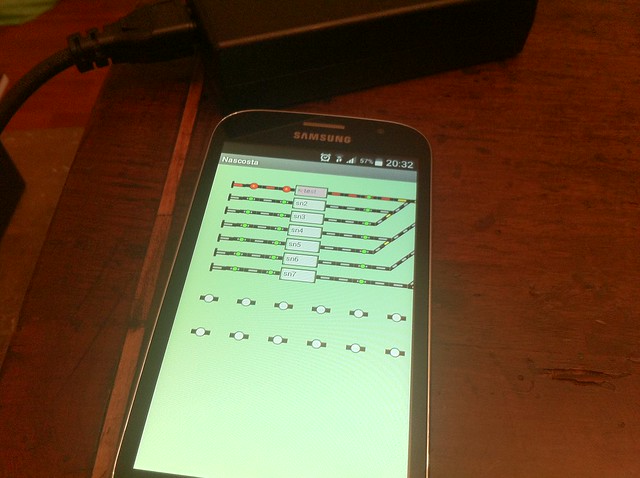
La schermata di lancio si presenta essenziale ma funzionale. Una volta inserito l'indirizzo del pc che controlla il plastico -basta farlo una volta, l'app se lo ricorda- e la porta a cui connettersi -io ho lasciato quella di default-, il programma si connette al server di RocRail e carica lo schema dell'impianto.
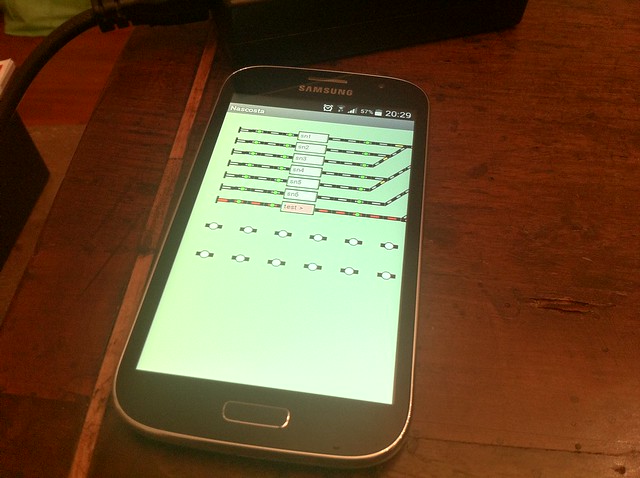
Come potete vedere, questo ricalca fedelmente quanto compare sullo schermo del PC (lo vedete meglio nel post precedente). In alto trovate il nome del pannello relativo alla parte che vogliamo controllare: in questo caso 'Nascosta'. Io ho deciso di creare un pannello per ogni livello così da poter gestire meglio le manovre, anche se sarebbe stato possibile fare un unico pannello per tutto il plastico, dato che la struttura non è delle più complicate.
Ora, tenendo premuto il nome del pannello a lungo si accede al menù di controllo.
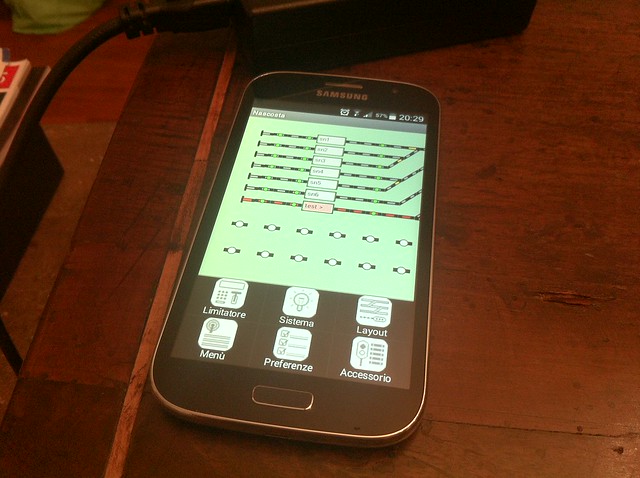
Qui la traduzione dall'inglese ha lasciato un poco a desiderare. "Limitatore" in realtà dovrebbe essere tradotto tutt'al più come "Regolatore", in quanto permette di controllare la marcia di una delle loco sul plastico. Vediamo piuttosto di accendere il sistema. Facendo click su "Sistema" si accede a questa schermata.
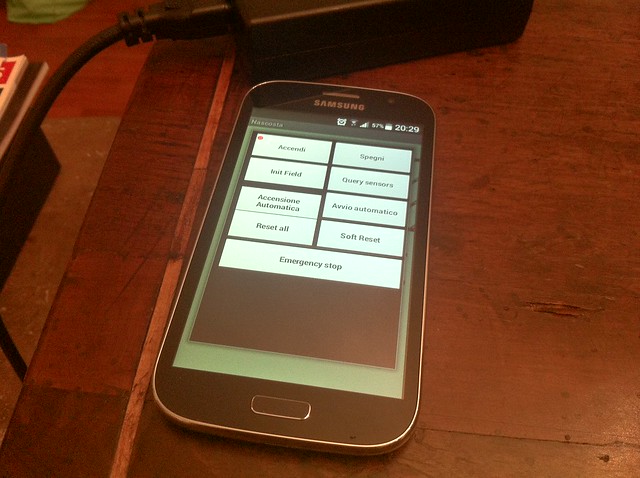
Anche qui la traduzione non ci viene sempre in aiuto, purtroppo... Accendiamo l'impianto tramite il pulsante "Accendi" e facciamo partire la modalità automatica con "Accensione automatica". Ora, dato che ho già configurato il sistema per far muovere alternativamente il convoglio di test dal binario 7 al binario 1 e ritorno, transitando per il cappio di ritorno -binario 8-, manca solo di dare il via alla locomotiva.
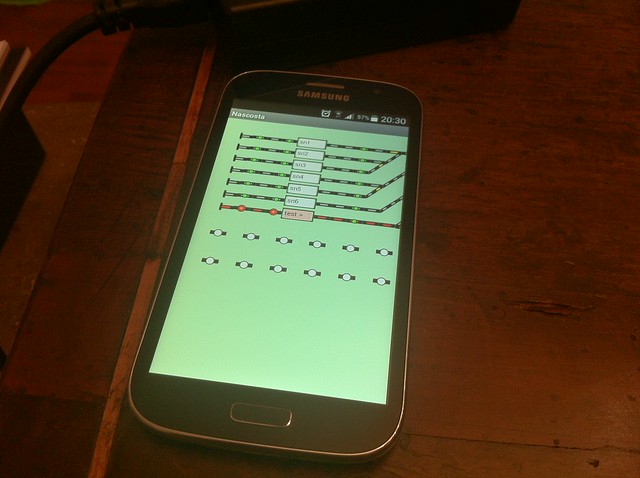
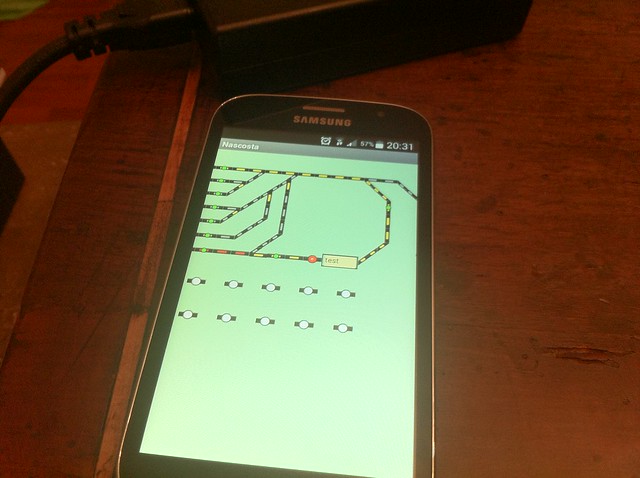
Infatti ora tutto è pronto: il sistema rileva il convoglio sul binario 7 ed in particolare mi sta dicendo che è proprio all'estremo destro. Deduco questo dal fatto che la spia al centro, affianco alla sezione di blocco entro cui è scritto "test >" è accesa con luce rossa: questo vuol dire che su quella tratta c'è assorbimento di corrente. A sinistra c'è inoltre una seconda spia a luce rossa: questa corrisponde al rilevatore infrarosso che sta segnalando occupazione. Le spie sui binari 1-6 sono tutte spente dato che i binari sono vuoti.
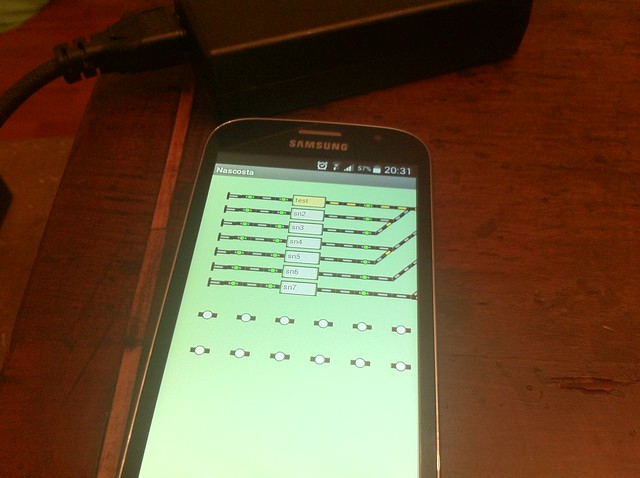
Ora posso cliccare su "test": si apre questo menù, che mi permette di controllare la E190.
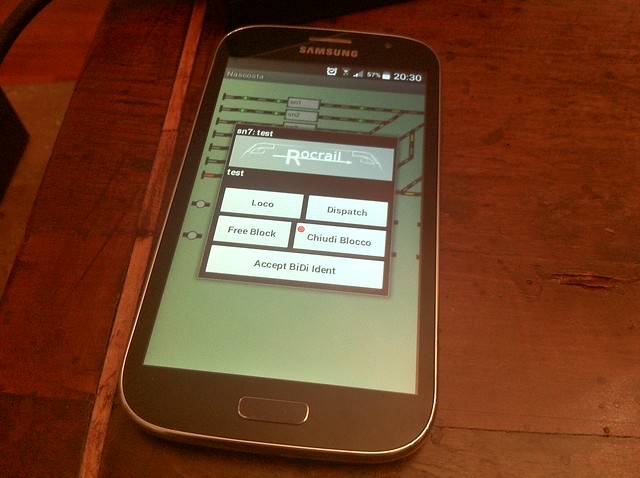
Facendo clic su "loco" si apre questo secondo menù.

Seleziono dal menù a tendina "schedule list" -scusate la traduzione incompleta...- ovvero dalla lista delle tabelle orarie la tabella di test e controllo che la loco sia correttamente assegnata alla sezione di blocco SN7, ovvero "stazione nascosta, binario 7".
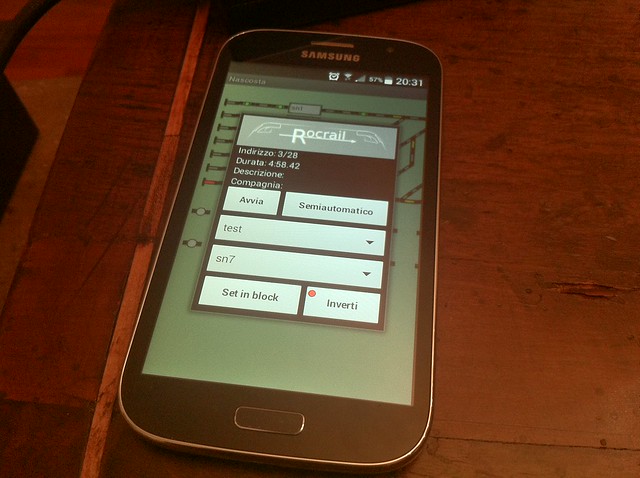
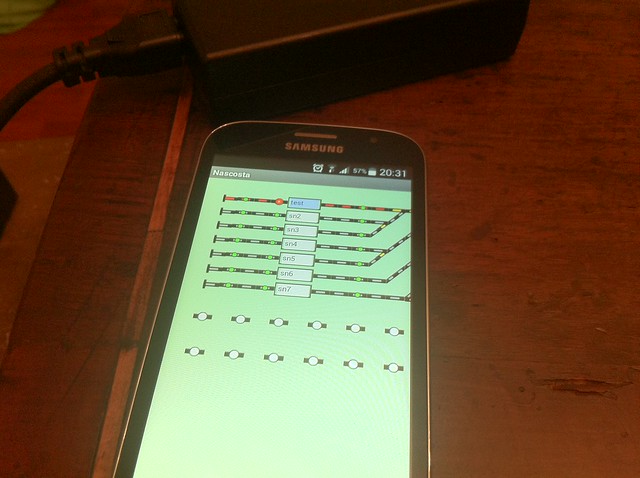
Ora posso premere su "avvia" ed il convoglio si mette in moto. Il percorso verso il binario 8 viene preparato e bloccato, indicato dal colore giallo.
Ora il convoglio è entrato nella sezione di blocco, come testimoniato dall'accensione della spia corrispondente al sensore di occupazione. La prima spia resta verde, al momento, perché non ho ancora installato e cablato il sensore infrarosso corrispondente a quel punto di fermata.
Viene ora prenotato e bloccato il secondo itinerario verso il binario 1...
... che viene percorso dal convoglio di test fino all'ingresso nel blocco. Tre secondi dopo l'ingresso il treno decelera dal 50% al 20% della velocità massima preparandosi all'arresto ed inversione di marcia.
L'arresto avviene in corrispondenza del sensore infrarosso che protegge la fine del binario: la spia si accende non appena il convoglio passa davanti al sensore.
A questo punto, dopo una decina di secondi di pausa, il convoglio inverte la direzione e ritorna sul binario 7.

Approfittando di una pausa tra le corse di test, qui sopra potete vedere il convoglio fermo sul primo binario.
La precisione del punto di arresto dipende da due fattori: prima di tutto, la velocità che ha la loco al momento in cui passa davanti al sensore. Questo è piuttosto intuitivo: tanto più va veloce, maggiore sarà lo spazio di arresto, soprattutto se il decoder installato è programmato per simulare accelerazioni realistiche. Ma c'è anche un secondo parametro, più subdolo, che è il tempo di risposta del sistema di controllo: infatti, tanto più tempo impiega il sistema a processare il messaggio inviato dal sensore, maggiore sarà lo spazio percorso dalla loco. Come potete vedere, però, è possibile ottenere una buona precisione: la E190 si è fermata a circa 3cm dalla fine del binario, 5cm dalla fine dell'impianto.
Per oggi è tutto: nelle prossime due settimane sarò molto impegnato per lavoro fuori casa quindi non vi garantisco di essere in grado di scrivere qualcosa puntualmente il martedì. Ho già un po' di materiale pronto: spero di riuscire a trovare il tempo per sistemarlo un poco.
A presto!!
Nessun commento:
Posta un commento