Con questo post concludo la serie sulla configurazione dei decoder: ormai la stazione nascosta del mio plastico ha accumulato più di 100 ore di funzionamento senza grossi inconvenienti, gli automatismi hanno sempre funzionato bene così come i sensori. Quindi è ora di cominciare a pensare al piano superiore.
Ma torniamo al tema di oggi: il punto di arresto, o meglio l'inerzia di arresto e di partenza. La taratura di questo parametri è decisamente importante nel caso si vogliano operare trazioni doppie o simmetriche. Infatti, non è sufficiente tarare la curva delle velocità: se due loco hanno la stessa curva, ma inerzia diversa, ci si ritroverà giocoforza con una delle loco che slitta.
Questi due parametri sono legati a diverse CV, in funzione del profilo di arresto che desideriamo applicare. Alcuni decoder, come il Lenz STANDARD+ o l'ESU LokPilot 4, forniscono due modalità, distanza di arresto proporzionale e distanza di arresto costante. Qui sotto vedete due grafici di esempio tratti dal manuale del Lenz GOLD+.

Nel primo caso, a sinistra, quando il decoder riceve un messaggio di arresto (velocità impostata a 0), inizia subito a frenare ed lo spazio di arresto dipende dalla velocità: quanto più è alta, tanto più tempo impiegherà a fermarsi. Nel secondo caso, a destra, il decoder frena tanto più rapidamente quanto maggiore è la velocità. Purtroppo la strategia per ottenere la distanza di arresto costante non è univoca: ad esempio gli ESU LokPilot 4 introducono un ritardo variabile a seconda della velocità di partenza.
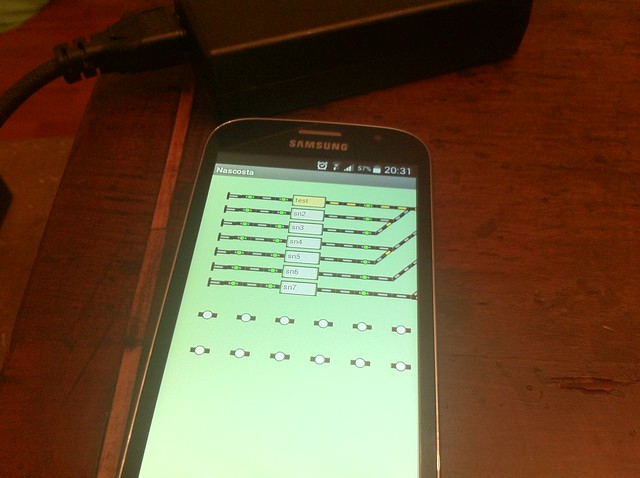
Ho fatto qualche esperimento, dato che ero piuttosto interessato alla distanza di arresto costante, soprattutto nella stazione nascosta dove ci sono i 7 binari tronchi, ma non sono stato molto convinto.

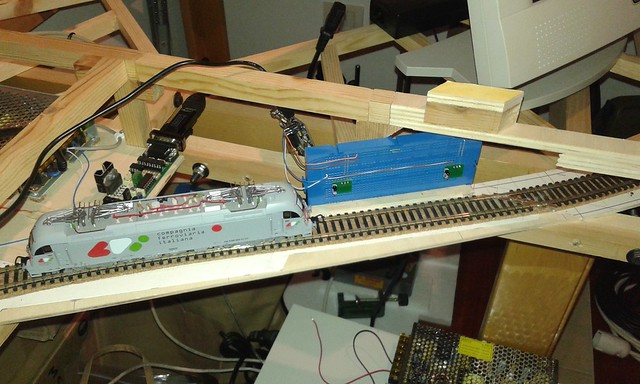
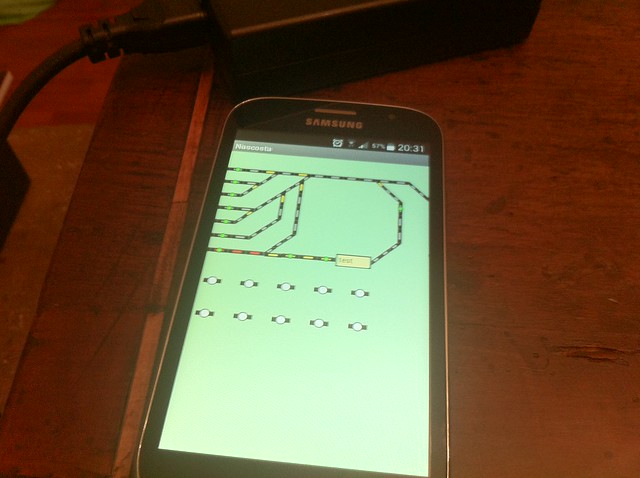
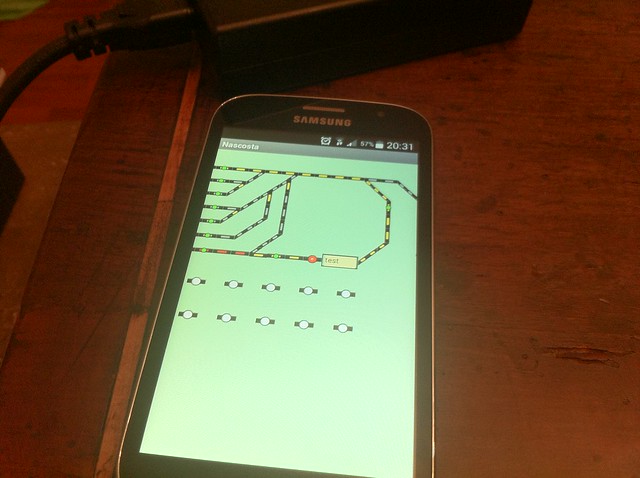
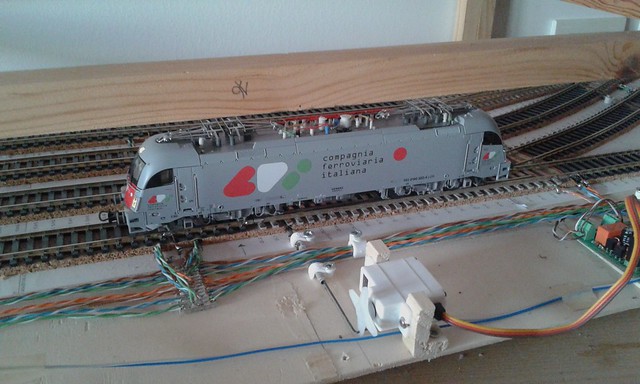
Come potete vedere da questa foto, è vero che sono riuscito ad ottenere uno spazio di arresto di misura molto prossima alla lunghezza dei binari di ricovero ma, pensando alla possibilità di animare il traffico sul plastico, trovo che abbia ben poco senso che ogni loco impieghi 180cm per fermarsi, in qualunque condizione. E' vero che si può sempre abilitare la modalità manovra per aggirare questo comportamento, ma ve lo vedete un Frecciarossa 1000 con ha lo stesso spazio di arresto di una 245? Per questo ho deciso di disabilitare la frenata con spazio di arresto costante, impostando il bit corrispondente in ogni decoder (scusate se non sono preciso qui: purtroppo ogni costruttore usa il suo standard in questo caso).
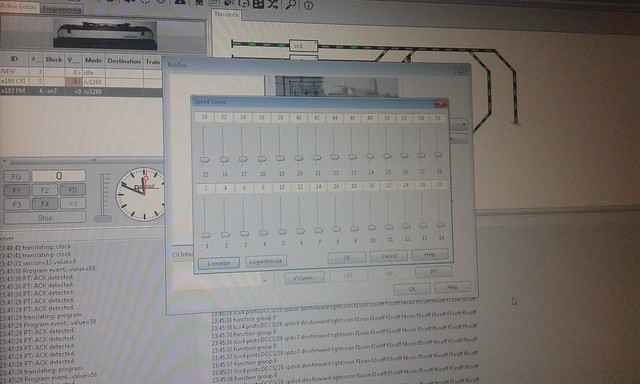
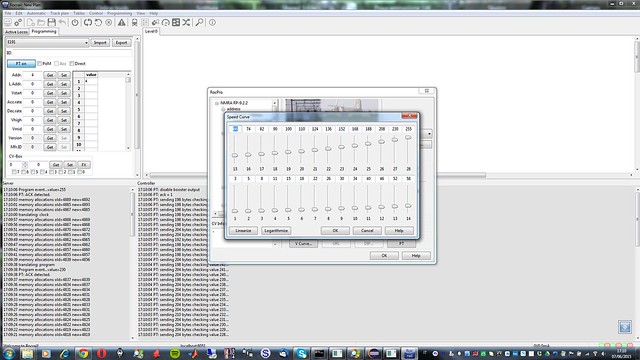
Quanto allo spazio di arresto proporzionale, per tararlo è necessario scegliere una velocità di riferimento: nel mio caso ho scelto il soliti 30kmh discussi nel post precedente. Quanto alla distanza, visto che non ho così tanto spazio sul plastico, ho pensato di scegliere 20cm. Fatta questa scelta, ho segnato il punto di arresto con una freccia. Al primo tentativo, CV4 = 5, sono andato decisamente corto.

A questo punto ho aumentato l'inerzia, CV4 = 20, ma sono andato abbastanza lungo.
Terzo tentativo, CV4 = 15, ancora corto ma ci siamo quasi.

Risultato finale, CV4 = 16, a segno sulla freccia. Ho ripetuto la stessa procedura anche con la E191.003 e fortunatamente il settaggio ha dato lo stesso risultato.
Per quanto riguarda l'inerzia di accelerazione ho usato come valore di primo tentativo lo stesso usato per l'inerzia di frenata. Fortunatamente è andato tutto bene al primo colpo, ed ora le due loco si comportano ottimamente e nessuna delle due slitta.
A presto!