Sull'onda dell'entusiasmo dell'essere riuscito a leggere le CV come si deve questo weekend sono subito passato alla taratura delle velocità delle loco. Però, per fare un buon lavoro, come si vede in questo post con video (link) di Vikas Chander, è necessario uno strumento per misurare la velocità delle loco in scala.
Cercando in giro su internet si trovano varie soluzioni: Vikas utilizza un sistema di Accutrack (link) basato su una barriera a raggi infrarossi da installare su un tratto di binario, ma esiste anche il sistema proposto da Bachrus (link) che si basa sulla lettura della velocità di rotolamento; in questo caso si usa un set di cuscinetti a sfera.
Dal mio punto di vista, il secondo sistema è preferibile: non c'è bisogno di un lungo tratto di binario per permettere alla loco di raggiungere la velocità da misurare, quindi il tutto rimane più compatto. Una soluzione per realizzare in casa questo sistema è quello di sfruttare un vecchio mouse di quelli con la sfera. Questi "topi" infatti usano una coppia di ruote traforate per individuare gli spostamenti della sfera.

Quanto la ruota gira, le lamelle ostacolano il fascio di luce emesso dal led (light emitter) e ricevuto dal rivelatore (light detector). Stessa cosa si può fare per misurare la velocità dei una loco: se la ruota fosse trascinata nel movimento da un assale della loco, basterebbe misurare quanto frequentemente il fascio di luce viene interrotto per conoscere la velocità della loco.
Ovviamente, per permettere la rotazione degli altri assi, sono necessari dei cuscinetti a sfera. E visto che nel cassetto degli attrezzi me ne erano rimasti una decina dal mio piega rotaie, ho iniziato il progetto. Purtroppo però il diametro dei cuscinetti era troppo grande e, visto che ne servono due per asse, sarebbero andati a cozzare contro i tubi lancia sabbia di alcune delle mie loco.
Pertanto sono tornato alla soluzione basata sulla barriera infrarossa. Fortunatamente i sensori IR che ho progettato, realizzato e che vi ho mostrato vari post fa possono essere riciclati per questo scopo. In questo caso il funzionamento è ancora più semplice: per misurare la velocità basta contare quanto tempo passa tra l'interruzione della prima barriera e della seconda.

Per misurare i tempi e convertirli in una velocità è sufficiente un microcontrollore di bassa fascia: se ne trovano di molto economici in commercio, io preferisco il 12F1840 di Microchip. In questo caso però volevo qualcosa che fosse già configurato per interfacciarsi con il PC via USB, per mostrare il risultato della misura: avendo a disposizione un paio di schede di sviluppo di Xplain di Atmel, la scelta è caduta su quella.

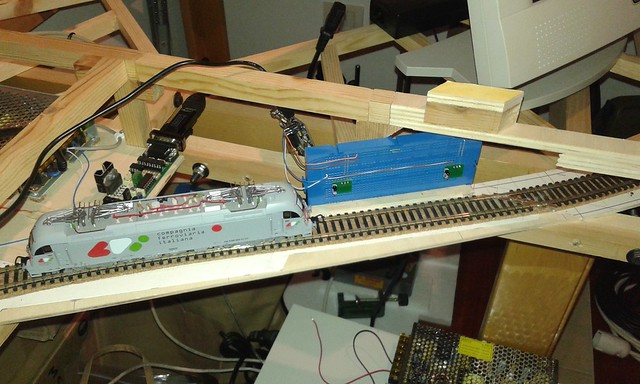
La potete vedere qui sopra dietro la basetta di sviluppo blu; quattro cavetti la collegano ai sensori: dall'alto alimentazione per i sensori a 5V, massa, e uscita di ciascun sensore. In questa immagine inoltre potete vedere che ho usato due spizze di legno per mantenere la basetta con i sensori ben parallela al binario.
Il funzionamento del mio tachimetro casalingo è semplicissimo. Una volta programmato e collegato il sistema al PC, con il mio fido cellulare trasformato in controllo remoto per RocRail programmo la loco per farsi un giro sul cappio di ritorno a velocità costante.

Quando la loco passa davanti al primo sensore si accende un led rosso, che segnala l'interruzione della barriera, ed il sistema inizia a contare in millesimi di secondi.

Quando la loco passa davanti al secondo sensore, si accende anche il secondo led rosso ed il sistema trasmette al PC la velocità rilevata, tradotta in km/h in scala.
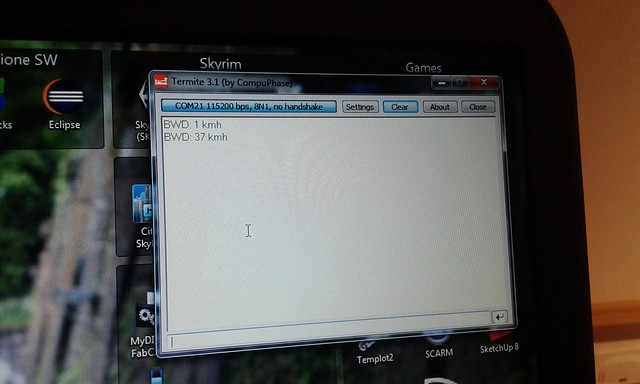
Il sistema è in grado di distinguere il verso con cui la locomotiva attraversa il tachimetro e lo segnala inserendo il prefisso BWD -backward- se la loco sta andando indietro o FWD -forward- se sta andando avanti. Questo aiuta a verificare la simmetria nelle condizioni di marcia: capita a volte, infatti, di leggere in qualche recensione che il comportamento nelle due direzioni non è esattamente identico.
Ora che ho la possibilità di misurare la velocità delle loco, posso dedicarmi alla taratura. Come suggerito da Chander nel suo post, ho pensato di fissare la velocità media -step 14 su 28- a 30km/h, ovvero alla velocità che un macchinista dove tenere in approccio ad un segnale di prima categoria disposto a via impedita. Per quanto riguarda la velocità minima, ho cercato di scendere fino al passo d'uomo, ovvero 4km/h. Infine, per la velocità massima, basta cercare in rete la velocità massima del rotabile corrispondente.
A questo punto ho provato a sfruttare la capacità dei decoder di regolare automaticamente le velocità dei passi intermedi fissando la velocità minima (CV2), massima (CV5) e media (CV6). Ho fatto qualche prova, ma non sono stato soddisfatto dai risultati. Pertanto ho preferito utilizzare le CV 67-94 e creare una mia personalissima curva delle velocità; per fare questo ho dovuto anche impostare ad 1 il bit 5 della CV 29.
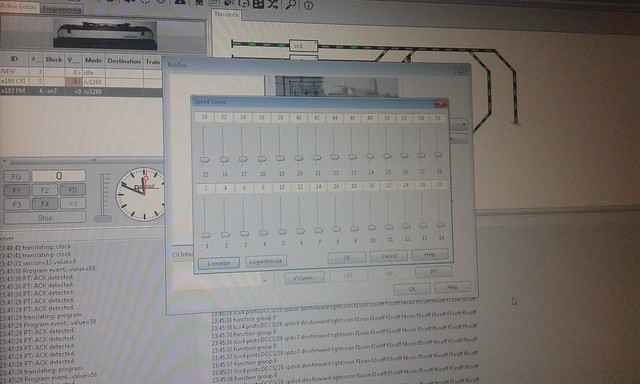
Prima di tutto ho impostato una curva lineare da 2 a 56. Poi ho misurato con il tachigrafo la velocità della loco agli step bassi (1-3) alla ricerca dei fantomatici 4km/h. Con una curva fatta in questo modo è piuttosto facile trovare il valore giusto: se la velocità non corrisponde esattamente ad uno step, quindi ad un valore pari, allora è sicuramente il valore dispari tra i due step più prossimi. Stessa cosa vale per la ricerca dei 30km/h: in questo caso però la ricerca parte dai valori centrali (13-15). Infine, per quanto riguarda la velocità massima, ho usato ancora una volta una curva lineare, ma questa volta da 2 a 254.

Ottenuti i valori giusti, mi sono scritto un foglio di calcolo con Google Documents che imposta una curva lineare per gli step 1-14 ed una curva quadratica per gli step 14-28. Ho fatto in modo che la pendenza della curva allo step 14 per entrambe le metà della curva sia la stessa: in questo modo non si nota alcuno scatto al passaggio tra i due regimi.
Impostare la velocità per la E 190 322 CFI, che monta un Lenz STANDARD+ è stata una pacchia. In pratica mi sono ritrovato con un valore di 4 per i 4km/h, un valore di 30 per i 30km/h e di 160 per i 160 km/h. Una favola!! La E 191 003 FuoriMuro, che invece monta un Esu LokPilot 4, è stato decisamente più ostico.
Comunque sia, sono finalmente riuscito a fare la prima doppia trazione di Caprazzino: terminata la taratura, la E190 e la E191 si sono comportate ottimamente. Non si sono mai strattonate e hanno superato l'ingresso della stazione nascosta senza alcun problema, a tutte le velocità.
Ora tocca alla distanza di frenatura.
A presto!
Nessun commento:
Posta un commento