Settimana intensa, quella appena trascorsa, ma non scevra di soddisfazioni! La mia centrale di controllo ha lentamente preso vita e posso finalmente farvi vedere qualcosa che si muove.
Devo ammettere che la documentazione su come realizzare la comunicazione non è proprio abbondante, sia dal punto di vista dei produttori di centrali (eccezion fatta per Lenz [link] ed una vecchia versione di Sprog [link]), sia dal punto di vista dei programmi di controllo. Capisco molto bene il punto di vista dei produttori commerciali e ritengo siano da elogiare i due che ho indicato per aver rilasciato al pubblico una descrizione -seppur forse incompleta- del protocollo di comunicazione. In giro ovviamente si trovano anche altri dettagli, ma preferisco non avere noie in seguito.
Al contrario proprio non capisco per quale motivo chi sviluppa software di controllo open-source (in questo momento, realmente aperto resta solo JMRI) non abbia previsto un meccanismo, non dico facile, ma almeno umano, per estendere la libreria di centrali di controllo. Pertanto ho dovuto arrangiarmi...

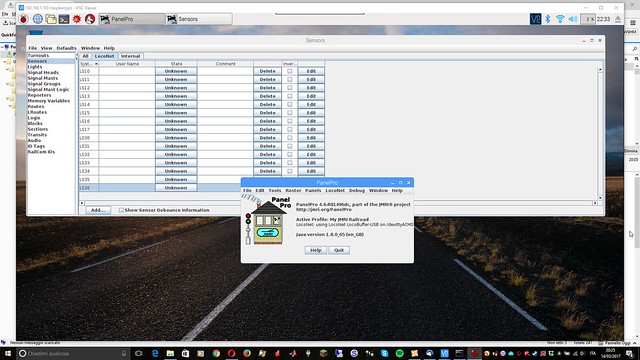
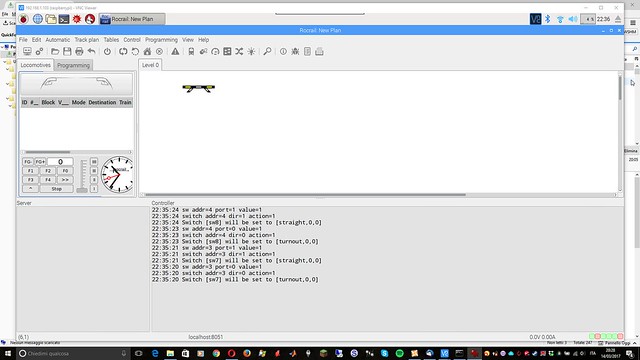
Qui sopra il sistema di pre-test: in pratica ho fatto in modo di trasferire al PC tutti i comandi che JMRI e Rocrail inviano tramite la porta seriale di uscita sulla Raspberry. Sarebbe stato un gioco da ragazzi se avessi avuto un convertitore USB-seriale adatto al voltaggio della Raspberry. Purtroppo non ce l'ho, quindi dovuto adottare una soluzione più complessa, riciclando la schedina che tempo fa avevo usato per il misuratore di velocità. In primo piano la scheda di programmazione e debug, subito dietro sulla destra quella di conversione, dietro ancora la Raspberry. Grazie ai dati letti in questo modo, ai sorgenti di uno dei due programmi di controllo di cui sopra ed alla documentazione ufficiale trovata in rete, sono riuscito a capire come scambiare i comandi.

A questo punto ho potuto finalmente programmare in modo adeguato la mia schedina e vedere accendersi i fanali della mia fida 245, che da sempre uso come muletto per queste prove, come potete intravvedere dalla foto qui sopra. Per dimostrarvi che non solo le luci funzionano, ma anche il motore fa il suo dovere, eccovi un piccolo video.
Non sono ancora granché soddisfatto della velocità di reazione e manca del tutto la parte di programmazione e lettura delle variabili di configurazione, quindi c'è ancora del lavoro da fare ma...
eppur si muove!
A presto!